CNN : Convolution Neural Nerwork import keras
from keras import models , layers
from keras import backend
D:\ProgramData\Anaconda3\envs\tensorflow-gpu\lib\site-packages\h5py\__init__.py:36: FutureWarning: Conversion of the second argument of issubdtype from `float` to `np.floating` is deprecated. In future, it will be treated as `np.float64 == np.dtype(float).type`.
from ._conv import register_converters as _register_converters
Using TensorFlow backend.
필기체 인식 class cnn ( models . Model ):
def __init__ ( self , input_shape , num_class ):
relu = layers . Activation ( 'relu' )
inL = layers . Input ( shape = input_shape )
conv0 = relu ( layers . Conv2D ( 32 , kernel_size = ( 3 , 3 ))( inL ))
conv1 = layers . Conv2D ( 64 , ( 3 , 3 ), activation = 'relu' )( conv0 )
maxpool = layers . MaxPooling2D ( pool_size = ( 2 , 2 ))( conv1 )
drop_and_flat = layers . Flatten ()( layers . Dropout ( 0.25 )( maxpool ))
fc0 = relu ( layers . Dense ( 128 )( drop_and_flat ))
drop = layers . Dropout ( 0.5 )( fc0 )
out = layers . Activation ( 'softmax' )( layers . Dense ( num_class )( drop ))
super () . __init__ ( inL , out )
self . compile ( loss = keras . losses . categorical_crossentropy , optimizer = 'rmsprop' , metrics = [ 'accuracy' ])
CNN의 경우 keras에서 바로 제공하는 CNN Layer가 존재하지는 않는다.
하지만, Convolutional layer와 paxpool 그리고 flatten 등 필요한 layer들은 미리 만들어져서 제공된다.
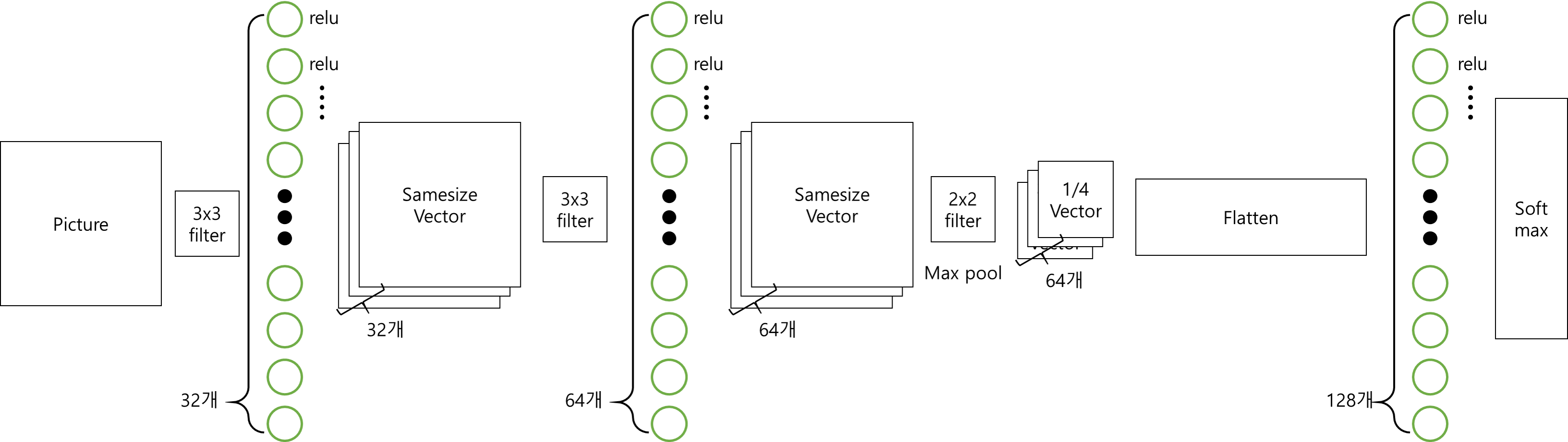
우리가(내가 (사실 참고한 책이) ) 설계한 모델은 아래와 같다
이는 LeNet 모델을 약간 변형한 것 이다.(두번째 Conv 레이어가 32개에서 64개)
from keras import datasets
class DATA ():
def __init__ ( self ):
num_classes = 10
( x_train , y_train ), ( x_test , y_test ) = datasets . mnist . load_data ()
self . X_test = x_test
self . Y_test = y_test
img_rows , img_cols = x_train . shape [ 1 :]
if backend . image_data_format () == 'channels_first' :
X_train = x_train . reshape ( x_train . shape [ 0 ], 1 , img_rows , img_cols )
X_test = x_test . reshape ( x_test . shape [ 0 ], 1 , img_rows , img_cols )
input_shape = ( 1 , img_rows , img_cols )
else :
X_train = x_train . reshape ( x_train . shape [ 0 ], img_rows , img_cols , 1 )
X_test = x_test . reshape ( x_test . shape [ 0 ], img_rows , img_cols , 1 )
input_shape = ( img_rows , img_cols , 1 )
X_train = X_train . astype ( 'float32' )
X_test = X_test . astype ( 'float32' )
X_train /= 255.0
X_test /= 255.0
Y_train = keras . utils . np_utils . to_categorical ( y_train , num_classes )
Y_test = keras . utils . np_utils . to_categorical ( y_test , num_classes )
self . input_shape = input_shape
self . num_classes = num_classes
self . x_train , self . y_train = X_train , Y_train
self . x_test , self . y_test = X_test , Y_test
데이터를 가져오고, 선처리하는 과정은 여태까지와 같다.
from kerasapp.skeras import plot_acc , plot_loss
import matplotlib.pyplot as plt
batch_size = 128
epochs = 10
data = DATA ()
model = cnn ( data . input_shape , data . num_classes )
위의 CNN 클래스 에서, 다음과 같이 정의하였다.
self.compile(loss=keras.losses.categorical_crossentropy, optimizer='rmsprop', metrics=['accuracy'])
따라서, optimizer로는 rmsprop를 loss로는 crossentropy를 사용하는것을 알 수 있다.
수행 결과 history = model . fit ( data . x_train , data . y_train , batch_size = batch_size , epochs = epochs , validation_split = 0.2 )
Train on 48000 samples, validate on 12000 samples
Epoch 1/10
48000/48000 [==============================] - 11s 222us/step - loss: 0.2380 - acc: 0.9255 - val_loss: 0.0625 - val_acc: 0.9807
Epoch 2/10
48000/48000 [==============================] - 7s 140us/step - loss: 0.0857 - acc: 0.9747 - val_loss: 0.0498 - val_acc: 0.9864
Epoch 3/10
48000/48000 [==============================] - 7s 137us/step - loss: 0.0657 - acc: 0.9805 - val_loss: 0.0427 - val_acc: 0.9877
Epoch 4/10
48000/48000 [==============================] - 7s 138us/step - loss: 0.0553 - acc: 0.9841 - val_loss: 0.0454 - val_acc: 0.9871
Epoch 5/10
48000/48000 [==============================] - 7s 137us/step - loss: 0.0485 - acc: 0.9859 - val_loss: 0.0415 - val_acc: 0.9890
Epoch 6/10
48000/48000 [==============================] - 7s 137us/step - loss: 0.0430 - acc: 0.9873 - val_loss: 0.0398 - val_acc: 0.9896
Epoch 7/10
48000/48000 [==============================] - 7s 137us/step - loss: 0.0419 - acc: 0.9871 - val_loss: 0.0401 - val_acc: 0.9892
Epoch 8/10
48000/48000 [==============================] - 7s 137us/step - loss: 0.0408 - acc: 0.9881 - val_loss: 0.0464 - val_acc: 0.9887
Epoch 9/10
48000/48000 [==============================] - 7s 137us/step - loss: 0.0424 - acc: 0.9879 - val_loss: 0.0465 - val_acc: 0.9889
Epoch 10/10
48000/48000 [==============================] - 7s 136us/step - loss: 0.0447 - acc: 0.9871 - val_loss: 0.0462 - val_acc: 0.9894
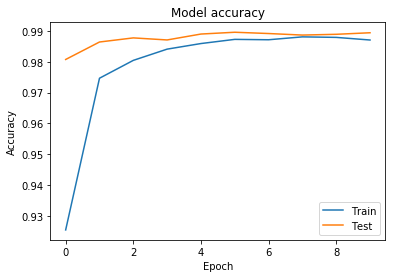
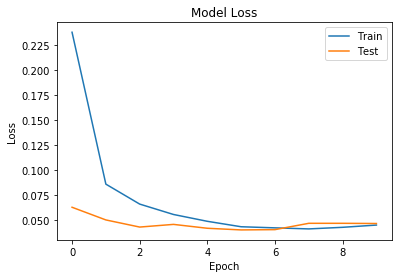
DNN에서보다 훨신 적은 10번의 Epoch를 돌렸다.
Epoch와 Batch의 의미를 알아보자.
Epoch Epoch 란, 총 몇번의 학습을 할지에 대한 값 이다. 즉, Epoch가 10 이라면, 같은 데이터 셋으로 10번의 학습을 하게 된다.
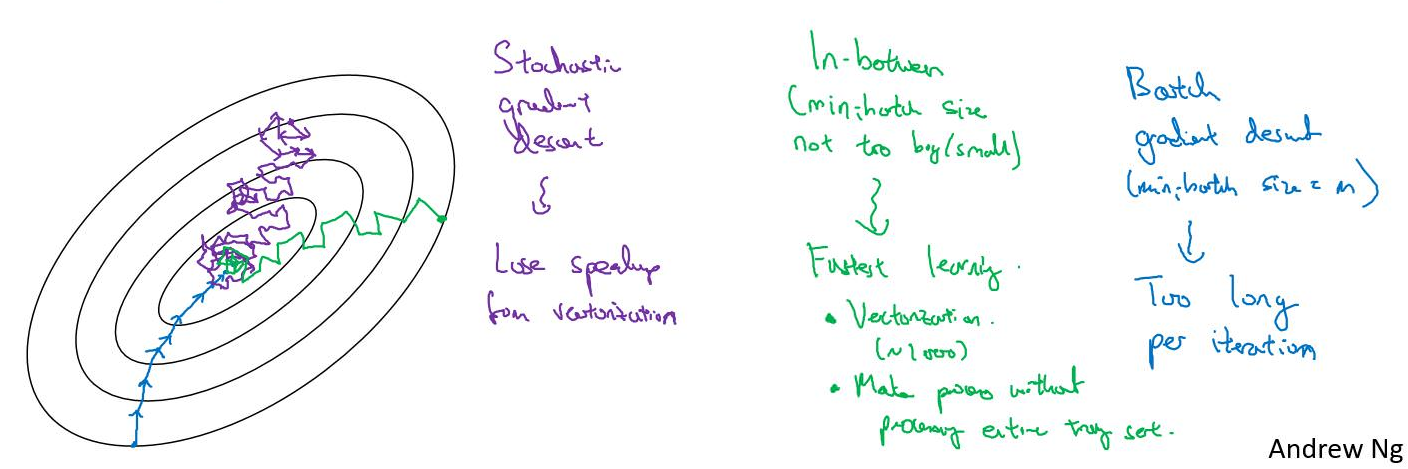
Batch Batch 란, 한번에 몇개의 데이터를 입력하여 학습을 할지를 정하는 값 이다. Batch사이즈가 커질수록 한번에 많은 데이터에 대한 loss값을 구하고 Gradient disecent에 적용하게 된다. 하지만 많은 메모리를 소모하게 된다. Batch사이즈가 작아질수록, 한번에 적은 데이터에대한 loss값을 구하여 적용하게 된다. 적은 메모리로 동작할수 있지만, 학습속도가 느려지게 된다. 전반적인 경사에 대한 하강이 아닌, 각 데이터에 대한 경사를 구하게 되기 때문이다.
이에 대해 잘 설명해 주신, 앤드류 응 교수님의 강의자료를 첨부한다.(코세라 출처)
여기에서, 파란 경우가 Batch크기가 전체 데이터의 크기와 같은 경우 (:=Batch gradient descent) 초록색이 적정한 Batch Size를 설정한 경우
score = model . evaluate ( data . x_test , data . y_test )
print ( score [ 0 ])
print ( score [ 1 ])
10000/10000 [==============================] - 1s 99us/step
0.039372063572064506
0.989
Accuracy가 98.9%까지 올라간것을 확인 가능하다.
칼라 이미지의 경우 from keras import datasets
class DATA ():
def __init__ ( self ):
num_classes = 10
( x_train , y_train ), ( x_test , y_test ) = datasets . cifar10 . load_data ()
self . X_test = x_test
self . Y_test = y_test
img_rows , img_cols , img_ch = x_train . shape [ 1 :]
if backend . image_data_format () == 'channels_first' :
X_train = x_train . reshape ( x_train . shape [ 0 ], img_ch , img_rows , img_cols )
X_test = x_test . reshape ( x_test . shape [ 0 ], img_ch , img_rows , img_cols )
input_shape = ( img_ch , img_rows , img_cols )
else :
X_train = x_train . reshape ( x_train . shape [ 0 ], img_rows , img_cols , img_ch )
X_test = x_test . reshape ( x_test . shape [ 0 ], img_rows , img_cols , img_ch )
input_shape = ( img_rows , img_cols , img_ch )
X_train = X_train . astype ( 'float32' )
X_test = X_test . astype ( 'float32' )
X_train /= 255.0
X_test /= 255.0
Y_train = keras . utils . np_utils . to_categorical ( y_train , num_classes )
Y_test = keras . utils . np_utils . to_categorical ( y_test , num_classes )
self . input_shape = input_shape
self . num_classes = num_classes
self . x_train , self . y_train = X_train , Y_train
self . x_test , self . y_test = X_test , Y_test
모델은 이전의 CNN과 같은 모델을 사용하도록 한다.
batch_size = 128
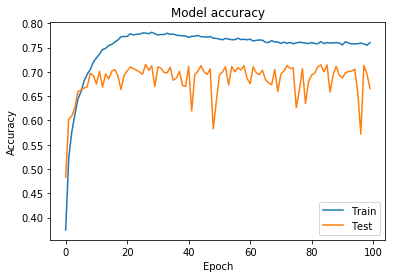
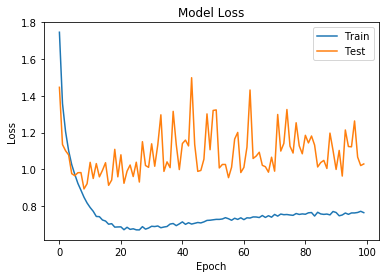
epochs = 100
data = DATA ()
model = cnn ( data . input_shape , data . num_classes )
history = model . fit ( data . x_train , data . y_train , batch_size = batch_size , epochs = epochs , validation_split = 0.2 )
Train on 40000 samples, validate on 10000 samples
Epoch 1/100
40000/40000 [==============================] - 8s 207us/step - loss: 1.7465 - acc: 0.3748 - val_loss: 1.4466 - val_acc: 0.4833
Epoch 2/100
40000/40000 [==============================] - 8s 195us/step - loss: 1.3579 - acc: 0.5228 - val_loss: 1.1348 - val_acc: 0.6027
Epoch 3/100
40000/40000 [==============================] - 8s 195us/step - loss: 1.2052 - acc: 0.5769 - val_loss: 1.1011 - val_acc: 0.6093
Epoch 4/100
40000/40000 [==============================] - 8s 194us/step - loss: 1.1011 - acc: 0.6121 - val_loss: 1.0780 - val_acc: 0.6271
Epoch 5/100
40000/40000 [==============================] - 8s 195us/step - loss: 1.0255 - acc: 0.6448 - val_loss: 0.9761 - val_acc: 0.6595
Epoch 6/100
40000/40000 [==============================] - 8s 194us/step - loss: 0.9723 - acc: 0.6593 - val_loss: 0.9651 - val_acc: 0.6632
Epoch 7/100
40000/40000 [==============================] - 8s 194us/step - loss: 0.9234 - acc: 0.6816 - val_loss: 0.9813 - val_acc: 0.6668
Epoch 8/100
40000/40000 [==============================] - 8s 194us/step - loss: 0.8860 - acc: 0.6950 - val_loss: 0.9820 - val_acc: 0.6692
Epoch 9/100
40000/40000 [==============================] - 8s 195us/step - loss: 0.8475 - acc: 0.7049 - val_loss: 0.8929 - val_acc: 0.6969
Epoch 10/100
40000/40000 [==============================] - 8s 195us/step - loss: 0.8163 - acc: 0.7200 - val_loss: 0.9214 - val_acc: 0.6926
Epoch 11/100
40000/40000 [==============================] - 8s 196us/step - loss: 0.7917 - acc: 0.7288 - val_loss: 1.0379 - val_acc: 0.6751
Epoch 12/100
40000/40000 [==============================] - 8s 197us/step - loss: 0.7710 - acc: 0.7367 - val_loss: 0.9500 - val_acc: 0.7013
Epoch 13/100
40000/40000 [==============================] - 8s 196us/step - loss: 0.7430 - acc: 0.7461 - val_loss: 1.0310 - val_acc: 0.6688
Epoch 14/100
40000/40000 [==============================] - 8s 202us/step - loss: 0.7419 - acc: 0.7485 - val_loss: 0.9588 - val_acc: 0.6956
Epoch 15/100
40000/40000 [==============================] - 8s 198us/step - loss: 0.7238 - acc: 0.7545 - val_loss: 0.9941 - val_acc: 0.6855
Epoch 16/100
40000/40000 [==============================] - 8s 194us/step - loss: 0.7181 - acc: 0.7566 - val_loss: 1.0358 - val_acc: 0.7018
Epoch 17/100
40000/40000 [==============================] - 8s 194us/step - loss: 0.7007 - acc: 0.7616 - val_loss: 0.9126 - val_acc: 0.7046
Epoch 18/100
40000/40000 [==============================] - 8s 194us/step - loss: 0.7037 - acc: 0.7658 - val_loss: 0.9415 - val_acc: 0.6918
Epoch 19/100
40000/40000 [==============================] - 8s 198us/step - loss: 0.6848 - acc: 0.7723 - val_loss: 1.1086 - val_acc: 0.6637
Epoch 20/100
40000/40000 [==============================] - 8s 194us/step - loss: 0.6858 - acc: 0.7729 - val_loss: 0.9589 - val_acc: 0.6928
Epoch 21/100
40000/40000 [==============================] - 8s 194us/step - loss: 0.6863 - acc: 0.7729 - val_loss: 1.0789 - val_acc: 0.7019
Epoch 22/100
40000/40000 [==============================] - 8s 193us/step - loss: 0.6707 - acc: 0.7785 - val_loss: 0.9237 - val_acc: 0.7102
Epoch 23/100
40000/40000 [==============================] - 8s 193us/step - loss: 0.6840 - acc: 0.7761 - val_loss: 0.9896 - val_acc: 0.7070
Epoch 24/100
40000/40000 [==============================] - 8s 193us/step - loss: 0.6727 - acc: 0.7774 - val_loss: 1.0234 - val_acc: 0.7037
Epoch 25/100
40000/40000 [==============================] - 8s 193us/step - loss: 0.6759 - acc: 0.7778 - val_loss: 0.9605 - val_acc: 0.6997
Epoch 26/100
40000/40000 [==============================] - 8s 194us/step - loss: 0.6701 - acc: 0.7801 - val_loss: 1.0386 - val_acc: 0.6952
Epoch 27/100
40000/40000 [==============================] - 8s 196us/step - loss: 0.6697 - acc: 0.7800 - val_loss: 0.9305 - val_acc: 0.7154
Epoch 28/100
40000/40000 [==============================] - 8s 194us/step - loss: 0.6875 - acc: 0.7785 - val_loss: 1.1503 - val_acc: 0.7034
Epoch 29/100
40000/40000 [==============================] - 8s 196us/step - loss: 0.6738 - acc: 0.7817 - val_loss: 1.0206 - val_acc: 0.7123
Epoch 30/100
40000/40000 [==============================] - 8s 197us/step - loss: 0.6799 - acc: 0.7787 - val_loss: 1.0106 - val_acc: 0.6699
Epoch 31/100
40000/40000 [==============================] - 8s 194us/step - loss: 0.6896 - acc: 0.7762 - val_loss: 1.1388 - val_acc: 0.7105
Epoch 32/100
40000/40000 [==============================] - 8s 196us/step - loss: 0.6880 - acc: 0.7772 - val_loss: 1.0165 - val_acc: 0.7075
Epoch 33/100
40000/40000 [==============================] - 8s 203us/step - loss: 0.6911 - acc: 0.7769 - val_loss: 1.1340 - val_acc: 0.6987
Epoch 34/100
40000/40000 [==============================] - 8s 200us/step - loss: 0.6816 - acc: 0.7797 - val_loss: 1.2967 - val_acc: 0.6981
Epoch 35/100
40000/40000 [==============================] - 8s 197us/step - loss: 0.6855 - acc: 0.7773 - val_loss: 0.9886 - val_acc: 0.7096
Epoch 36/100
40000/40000 [==============================] - 8s 197us/step - loss: 0.6883 - acc: 0.7779 - val_loss: 1.0405 - val_acc: 0.6828
Epoch 37/100
40000/40000 [==============================] - 8s 196us/step - loss: 0.7016 - acc: 0.7758 - val_loss: 1.0090 - val_acc: 0.6871
Epoch 38/100
40000/40000 [==============================] - 8s 208us/step - loss: 0.7045 - acc: 0.7749 - val_loss: 1.3155 - val_acc: 0.7013
Epoch 39/100
40000/40000 [==============================] - 8s 206us/step - loss: 0.6930 - acc: 0.7744 - val_loss: 1.1347 - val_acc: 0.6724
Epoch 40/100
40000/40000 [==============================] - 8s 193us/step - loss: 0.7025 - acc: 0.7741 - val_loss: 0.9985 - val_acc: 0.6704
Epoch 41/100
40000/40000 [==============================] - 8s 193us/step - loss: 0.7134 - acc: 0.7711 - val_loss: 1.1402 - val_acc: 0.7112
Epoch 42/100
40000/40000 [==============================] - 8s 194us/step - loss: 0.7001 - acc: 0.7732 - val_loss: 1.1590 - val_acc: 0.6196
Epoch 43/100
40000/40000 [==============================] - 8s 197us/step - loss: 0.7087 - acc: 0.7736 - val_loss: 1.1273 - val_acc: 0.6945
Epoch 44/100
40000/40000 [==============================] - 8s 197us/step - loss: 0.7016 - acc: 0.7752 - val_loss: 1.4988 - val_acc: 0.7013
Epoch 45/100
40000/40000 [==============================] - 8s 199us/step - loss: 0.7057 - acc: 0.7725 - val_loss: 1.1355 - val_acc: 0.7128
Epoch 46/100
40000/40000 [==============================] - 8s 208us/step - loss: 0.7101 - acc: 0.7722 - val_loss: 0.9887 - val_acc: 0.7001
Epoch 47/100
40000/40000 [==============================] - 8s 200us/step - loss: 0.7078 - acc: 0.7717 - val_loss: 0.9936 - val_acc: 0.6947
Epoch 48/100
40000/40000 [==============================] - 8s 199us/step - loss: 0.7135 - acc: 0.7729 - val_loss: 1.0550 - val_acc: 0.7063
Epoch 49/100
40000/40000 [==============================] - 8s 212us/step - loss: 0.7215 - acc: 0.7696 - val_loss: 1.3017 - val_acc: 0.5829
Epoch 50/100
40000/40000 [==============================] - 8s 205us/step - loss: 0.7225 - acc: 0.7689 - val_loss: 1.1065 - val_acc: 0.6390
Epoch 51/100
40000/40000 [==============================] - 8s 203us/step - loss: 0.7249 - acc: 0.7679 - val_loss: 1.3206 - val_acc: 0.6940
Epoch 52/100
40000/40000 [==============================] - 8s 201us/step - loss: 0.7271 - acc: 0.7661 - val_loss: 1.3234 - val_acc: 0.6998
Epoch 53/100
40000/40000 [==============================] - 8s 197us/step - loss: 0.7270 - acc: 0.7689 - val_loss: 1.0073 - val_acc: 0.7110
Epoch 54/100
40000/40000 [==============================] - 8s 199us/step - loss: 0.7292 - acc: 0.7676 - val_loss: 1.0262 - val_acc: 0.6730
Epoch 55/100
40000/40000 [==============================] - 8s 202us/step - loss: 0.7364 - acc: 0.7664 - val_loss: 1.0263 - val_acc: 0.7111
Epoch 56/100
40000/40000 [==============================] - 10s 243us/step - loss: 0.7305 - acc: 0.7664 - val_loss: 0.9544 - val_acc: 0.7001
Epoch 57/100
40000/40000 [==============================] - 8s 202us/step - loss: 0.7223 - acc: 0.7694 - val_loss: 1.0113 - val_acc: 0.7088
Epoch 58/100
40000/40000 [==============================] - 8s 200us/step - loss: 0.7333 - acc: 0.7665 - val_loss: 1.1647 - val_acc: 0.7039
Epoch 59/100
40000/40000 [==============================] - 8s 199us/step - loss: 0.7269 - acc: 0.7673 - val_loss: 1.2008 - val_acc: 0.7128
Epoch 60/100
40000/40000 [==============================] - 8s 200us/step - loss: 0.7357 - acc: 0.7661 - val_loss: 0.9823 - val_acc: 0.6868
Epoch 61/100
40000/40000 [==============================] - 8s 201us/step - loss: 0.7256 - acc: 0.7673 - val_loss: 1.0100 - val_acc: 0.6758
Epoch 62/100
40000/40000 [==============================] - 10s 258us/step - loss: 0.7356 - acc: 0.7636 - val_loss: 1.1207 - val_acc: 0.7105
Epoch 63/100
40000/40000 [==============================] - 8s 205us/step - loss: 0.7344 - acc: 0.7651 - val_loss: 1.4319 - val_acc: 0.6978
Epoch 64/100
40000/40000 [==============================] - 9s 230us/step - loss: 0.7404 - acc: 0.7657 - val_loss: 1.0589 - val_acc: 0.6942
Epoch 65/100
40000/40000 [==============================] - 37s 928us/step - loss: 0.7401 - acc: 0.7653 - val_loss: 1.0718 - val_acc: 0.7035
Epoch 66/100
40000/40000 [==============================] - 37s 931us/step - loss: 0.7372 - acc: 0.7610 - val_loss: 1.0927 - val_acc: 0.6838
Epoch 67/100
40000/40000 [==============================] - 37s 928us/step - loss: 0.7481 - acc: 0.7606 - val_loss: 1.0217 - val_acc: 0.6777
Epoch 68/100
40000/40000 [==============================] - 37s 917us/step - loss: 0.7376 - acc: 0.7644 - val_loss: 1.0139 - val_acc: 0.6735
Epoch 69/100
40000/40000 [==============================] - 37s 927us/step - loss: 0.7471 - acc: 0.7614 - val_loss: 0.9842 - val_acc: 0.7049
Epoch 70/100
40000/40000 [==============================] - 37s 930us/step - loss: 0.7390 - acc: 0.7617 - val_loss: 1.0657 - val_acc: 0.6596
Epoch 71/100
40000/40000 [==============================] - 37s 928us/step - loss: 0.7540 - acc: 0.7585 - val_loss: 0.9897 - val_acc: 0.6953
Epoch 72/100
40000/40000 [==============================] - 37s 930us/step - loss: 0.7448 - acc: 0.7614 - val_loss: 1.2985 - val_acc: 0.7020
Epoch 73/100
40000/40000 [==============================] - 37s 936us/step - loss: 0.7560 - acc: 0.7587 - val_loss: 1.0992 - val_acc: 0.7130
Epoch 74/100
40000/40000 [==============================] - 37s 933us/step - loss: 0.7526 - acc: 0.7608 - val_loss: 1.1410 - val_acc: 0.7069
Epoch 75/100
40000/40000 [==============================] - 37s 932us/step - loss: 0.7536 - acc: 0.7580 - val_loss: 1.3256 - val_acc: 0.7082
Epoch 76/100
40000/40000 [==============================] - 37s 929us/step - loss: 0.7510 - acc: 0.7595 - val_loss: 1.1258 - val_acc: 0.6267
Epoch 77/100
40000/40000 [==============================] - 37s 932us/step - loss: 0.7492 - acc: 0.7613 - val_loss: 1.0885 - val_acc: 0.6615
Epoch 78/100
40000/40000 [==============================] - 38s 941us/step - loss: 0.7590 - acc: 0.7602 - val_loss: 1.2534 - val_acc: 0.7068
Epoch 79/100
40000/40000 [==============================] - 37s 928us/step - loss: 0.7541 - acc: 0.7594 - val_loss: 1.1280 - val_acc: 0.6349
Epoch 80/100
40000/40000 [==============================] - 9s 235us/step - loss: 0.7569 - acc: 0.7584 - val_loss: 1.0844 - val_acc: 0.6797
Epoch 81/100
40000/40000 [==============================] - 9s 231us/step - loss: 0.7551 - acc: 0.7606 - val_loss: 1.1851 - val_acc: 0.6935
Epoch 82/100
40000/40000 [==============================] - 8s 204us/step - loss: 0.7629 - acc: 0.7586 - val_loss: 1.1437 - val_acc: 0.6973
Epoch 83/100
40000/40000 [==============================] - 8s 200us/step - loss: 0.7643 - acc: 0.7580 - val_loss: 1.1813 - val_acc: 0.7104
Epoch 84/100
40000/40000 [==============================] - 9s 219us/step - loss: 0.7453 - acc: 0.7623 - val_loss: 1.1320 - val_acc: 0.7145
Epoch 85/100
40000/40000 [==============================] - 8s 198us/step - loss: 0.7658 - acc: 0.7582 - val_loss: 1.0126 - val_acc: 0.7004
Epoch 86/100
40000/40000 [==============================] - 8s 199us/step - loss: 0.7567 - acc: 0.7604 - val_loss: 1.0367 - val_acc: 0.7144
Epoch 87/100
40000/40000 [==============================] - 8s 198us/step - loss: 0.7543 - acc: 0.7594 - val_loss: 1.0484 - val_acc: 0.6582
Epoch 88/100
40000/40000 [==============================] - 8s 198us/step - loss: 0.7561 - acc: 0.7599 - val_loss: 1.0045 - val_acc: 0.6941
Epoch 89/100
40000/40000 [==============================] - 9s 220us/step - loss: 0.7516 - acc: 0.7604 - val_loss: 1.1970 - val_acc: 0.7115
Epoch 90/100
40000/40000 [==============================] - 8s 207us/step - loss: 0.7700 - acc: 0.7595 - val_loss: 1.1026 - val_acc: 0.6932
Epoch 91/100
40000/40000 [==============================] - 8s 208us/step - loss: 0.7645 - acc: 0.7556 - val_loss: 0.9993 - val_acc: 0.6877
Epoch 92/100
40000/40000 [==============================] - 8s 208us/step - loss: 0.7466 - acc: 0.7622 - val_loss: 1.1027 - val_acc: 0.6981
Epoch 93/100
40000/40000 [==============================] - 9s 214us/step - loss: 0.7511 - acc: 0.7593 - val_loss: 0.9631 - val_acc: 0.7009
Epoch 94/100
40000/40000 [==============================] - 9s 229us/step - loss: 0.7617 - acc: 0.7578 - val_loss: 1.2141 - val_acc: 0.7017
Epoch 95/100
40000/40000 [==============================] - 8s 209us/step - loss: 0.7546 - acc: 0.7578 - val_loss: 1.1240 - val_acc: 0.7056
Epoch 96/100
40000/40000 [==============================] - 8s 198us/step - loss: 0.7621 - acc: 0.7581 - val_loss: 1.1224 - val_acc: 0.6594
Epoch 97/100
40000/40000 [==============================] - 8s 198us/step - loss: 0.7621 - acc: 0.7594 - val_loss: 1.2632 - val_acc: 0.5719
Epoch 98/100
40000/40000 [==============================] - 8s 201us/step - loss: 0.7646 - acc: 0.7576 - val_loss: 1.0665 - val_acc: 0.7132
Epoch 99/100
40000/40000 [==============================] - 8s 199us/step - loss: 0.7711 - acc: 0.7549 - val_loss: 1.0203 - val_acc: 0.6958
Epoch 100/100
40000/40000 [==============================] - 8s 194us/step - loss: 0.7637 - acc: 0.7603 - val_loss: 1.0291 - val_acc: 0.6656
score = model . evaluate ( data . x_test , data . y_test )
print ( score [ 0 ])
print ( score [ 1 ])
10000/10000 [==============================] - 1s 119us/step
1.0261676851272583
0.6636
정확도와 loss가 앞선 DNN의 결과에 비해 상당히 좋아진것을 확인 가능함
label = [ "airlane" , 'automobile' , 'bird' , 'cat' , 'deer' , 'dog' , 'frog' , 'horse' , 'ship' , 'truck' ]
a = 35
plt . imshow ( data . X_test [ a ])
c = model . predict ( data . x_test [ a : a + 1 ])
print ( "predict: " , label [ c . tolist ()[ 0 ] . index ( c . max ())])
print ( "answer: " , label [ data . Y_test [ a ][ 0 ]])
predict: ship
answer: bird
이전에 맞추지 못했던, 35번을 맞췄다고 하고 싶었는데... 똑같이 못맞췄다...
ㅎ... 그래도 아무튼 수치상 성능이 개선되었으므로...
a = 351
plt . imshow ( data . X_test [ a ])
c = model . predict ( data . x_test [ a : a + 1 ])
print ( "predict: " , label [ c . tolist ()[ 0 ] . index ( c . max ())])
print ( "answer: " , label [ data . Y_test [ a ][ 0 ]])
predict: automobile
answer: automobile
A = []
P = []
ANS = []
for a in range ( 0 , 10000 ):
c = model . predict ( data . x_test [ a : a + 1 ])
pre = c . tolist ()[ 0 ] . index ( c . max ())
ans = data . Y_test [ a ][ 0 ]
if ( pre != ans ):
A . append ( a )
P . append ( pre )
ANS . append ( ans )
#print("index: ", a)
#print("predict: ", pre)
#print("answer: ", ans)
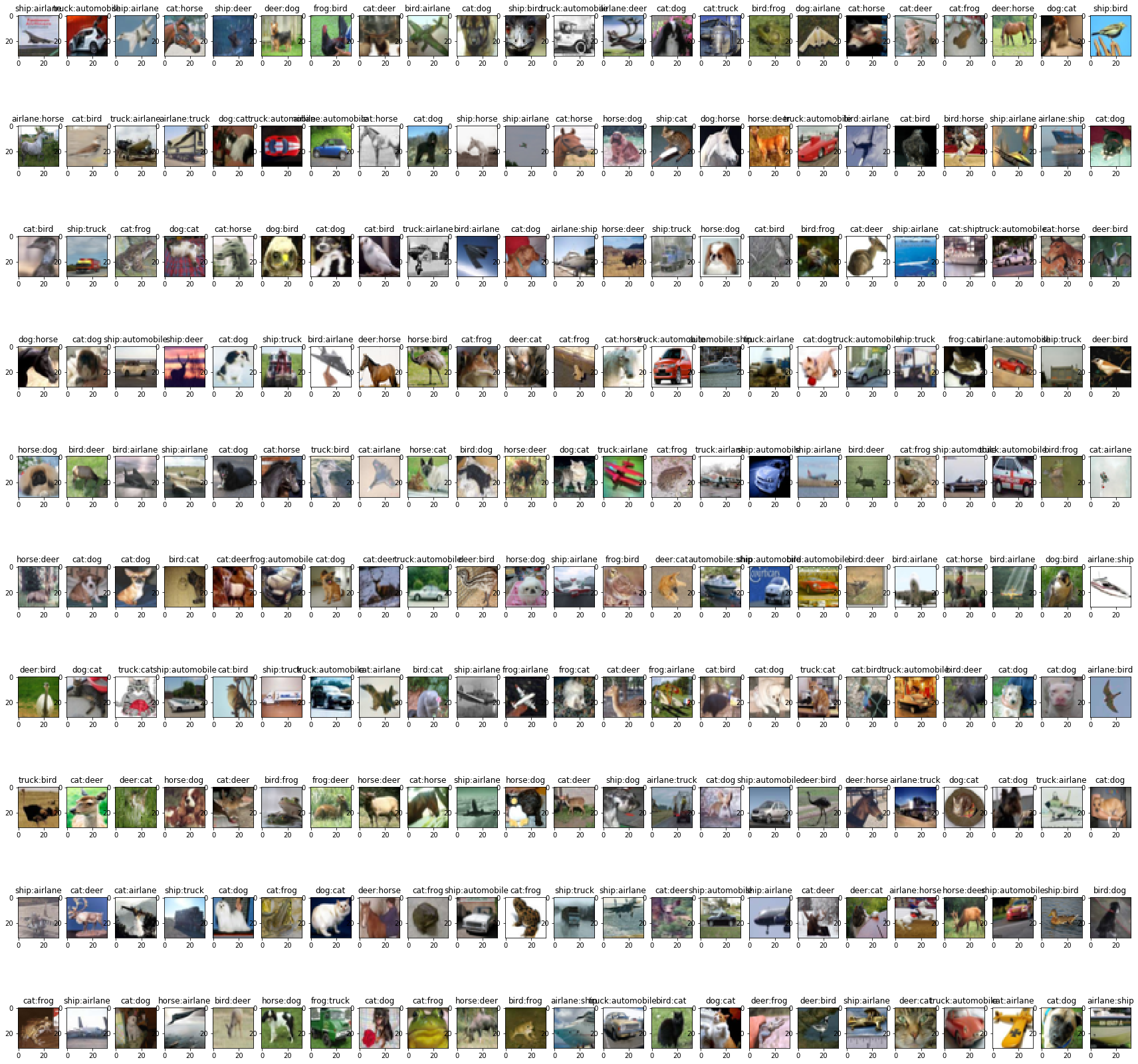
w = 10
h = 23
fig = plt . figure ( figsize = ( 30 , 30 ))
for j in range ( 0 , 230 ):
fig . add_subplot ( w , h , j + 1 )
plt . title ( label [ P [ j ]] + ":" + label [ ANS [ j ]])
plt . imshow ( data . X_test [ A [ j ]])
앞부터 순차적으로 틀린 이미지를 230개 보여주는 코드이다.
DNN에서의 결과에 포함되어있던 많은 결과가 없어진것을 확인 가능하다.